
HEXA (Hip Exoskeleton for Assistance)
The wearable robot HEXA (Hip Exoskeleton), with actuators on the hip joint, designed to help patients with lower limb disabilities, such as those with hemiplegic stroke and scissoring gait. HEXA restores or improves their walking ability and reduces the burden on caregivers.
Specs
70-watt BLDC motors with a precise harmonic drive gearbox, each driving a link which is placed on the human thigh and fastened
The robot actuators provide hip flexion torque during the gait cycle
Helps to improve symmetric movement, stride, linear speed, and walking duration




Design Evolution







HEXA I
HEXA II
HEXA III
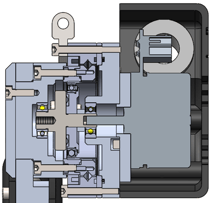
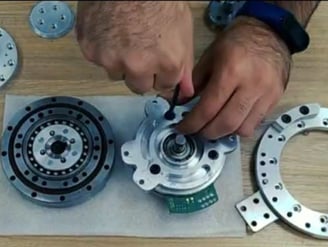
Dense Actuator Design
A dense actuator design with DC motor, Harmonic Drive gearbox, and loadcell sensor for feedback.

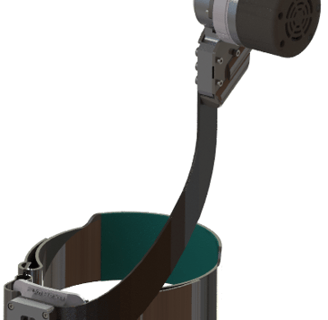
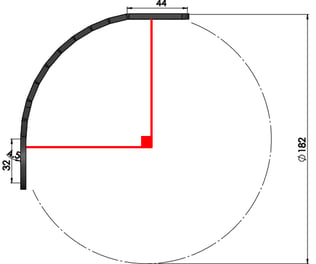
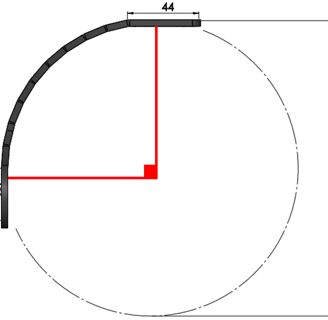
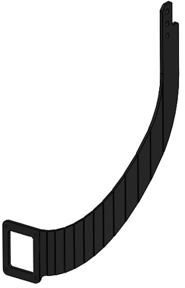
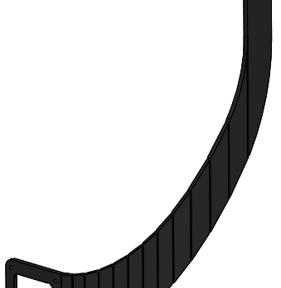
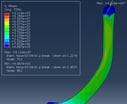
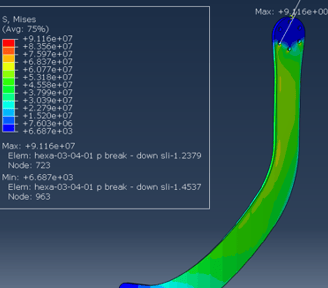
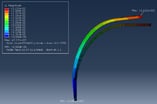
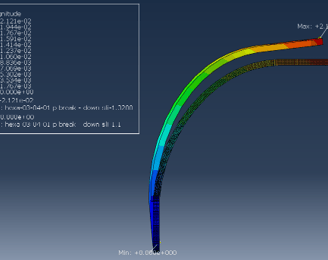
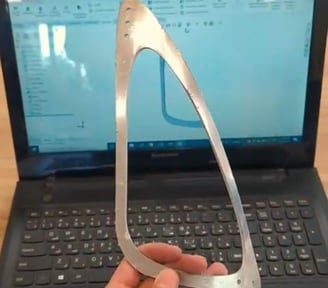
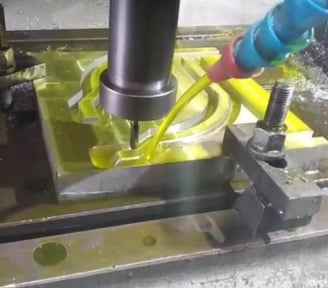
Links Sheet Metal Design


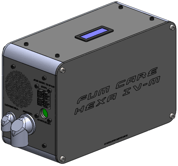
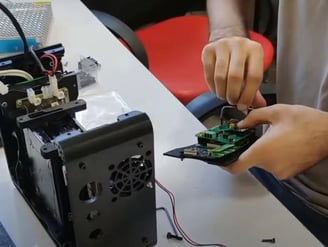
Electronic Box Design


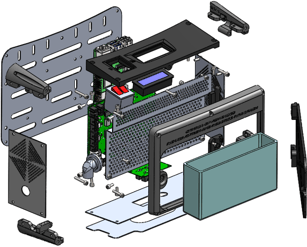
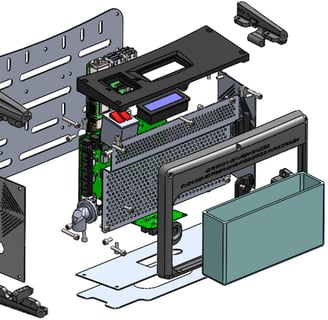
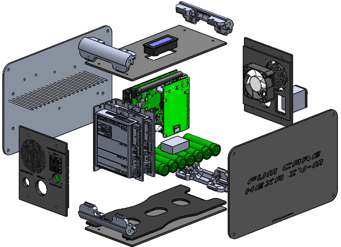
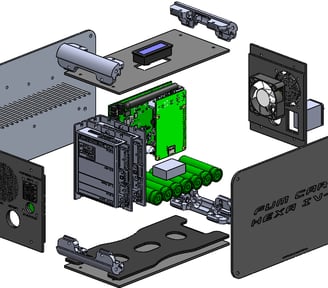

- Batteries -
- BMS -
- Controller Boards -
- Loadcell Boards -
- Motor Drivers -
- Charge Indicator LCD -
- WiFi Antenna and Board -
- Fan for Heat Dissipation -
- I/O Ports -
- Bottoms -




From Ideation to Product










HEXA in Action!
Portfolio
Showcasing my Mechatronics Engineering experience and projects.
Contact
© 2025. All rights reserved.